"Aquila"
Wildfire Reconassaince Drone

"Aquila" is a wildfire reconnaissance drone designed to monitor and report live information about ongoing wildfires. The aircraft and accompanying sensor/software package were created as a product for the Purdue Mechanical Engineering Senior Design competition. The final aircraft was a tilt-rotor VTOL drone, with a sensor package and software suite for monitoring. As a member of a 5 person design team, I worked for a semester to develop, build and test our product.
My role for the aircraft was in both manufacturing and validation. For manufacturing, the entire aircraft was 3D printed using PLA Aero, and a carbon fiber skeleton. Sliding rails were designed in the sensor bay to allow battery movement and a resulting variable CG for more stable flight. After rigorous testing, the printing of PLA Aero was perfected, and the use of small alignment tabs allowed for clean assembly despite challenging materials.
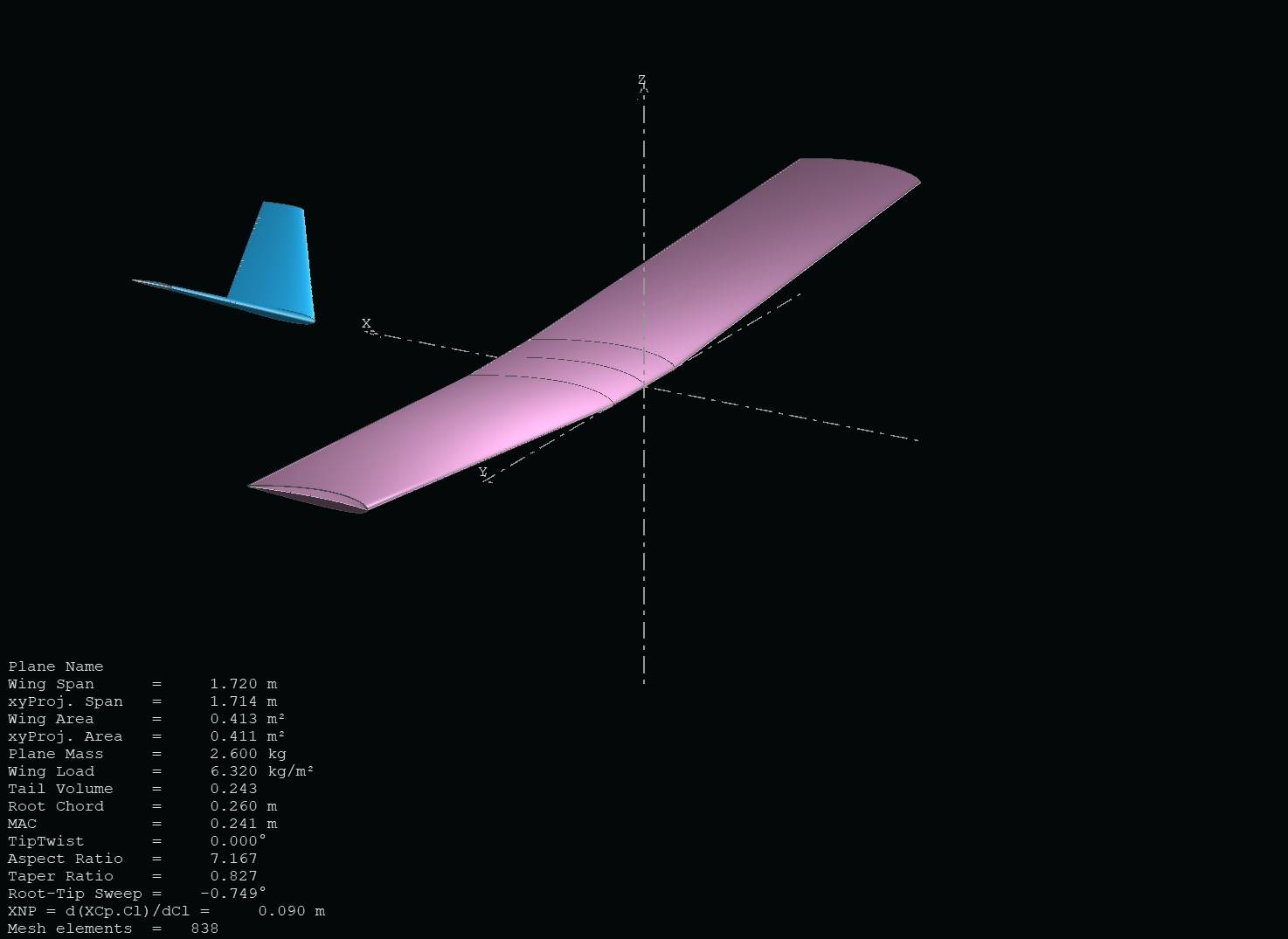
Prior to the aircraft manufacturing, I was also responsible for aerodynamic validation. The use of Xflr software allowed for easy static and dynamic stability simulation of the proposed drone configuration. A VTOL tilt-rotor design was chosen for ease of use and deployment, as well as long range flight and detection capabilities. The wings and tail sizing were then confirmed using stability analysis. PID tuning through Ardupilot was also used during flight testing to provide additional control over the aircraft.

Although never fully integrated, testing on both the aircrafts VTOL flight as well as the sensor package's detection and live uploading capabilities proved successful. Due to this, in the design expo for all engineering departments at Purdue, our team won first place for the Environmental Impact Award. In addition, the decision to build an aircraft also resulted in being a finalist for the Mallott Competition's Innovation Award.