Motor Thrust Stand
PART R&D
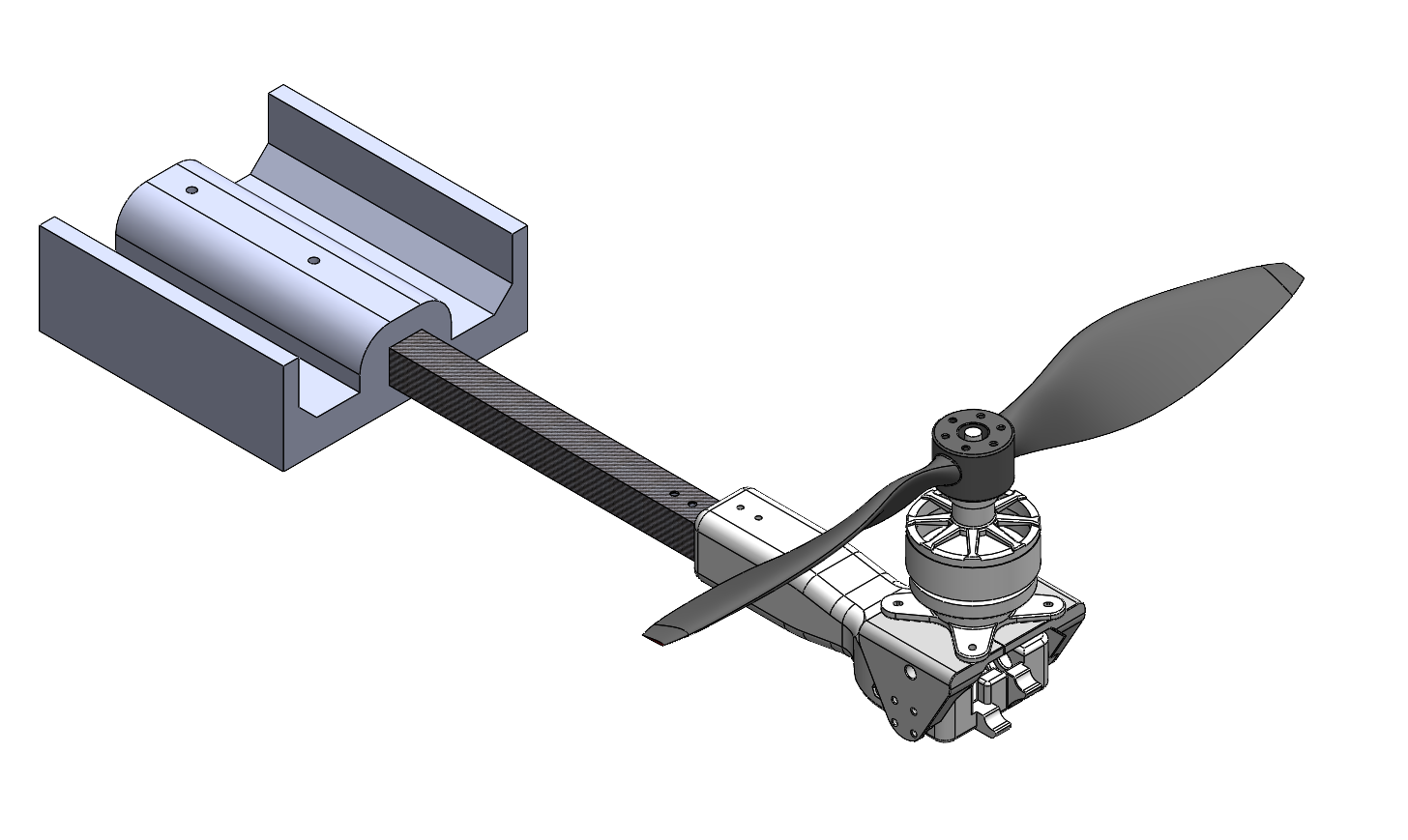
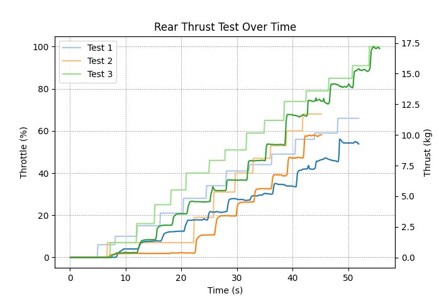
As the testing lead for the Purdue Aerial Robotics Research and Design division, one issue I was tasked with addressing was the thrust deficiencies of our V1 aircraft. To better understand the physical thrust our motors produced, I designed a test stand with 90° rotation and force measuring capabilities. I then calibrated the stand using weights and programmed it to output and graph thrust values at various throttle inputs in a vertical orientation as shown in the graph on the left. The same was done at different angles to learn more about how the physical system would act in various stages of transition.
The goal was to factor in real problems which simulations could not consider, such as blocked airflow due to the necessary tilting mechanism. V1 of the aircraft saw a significant decrease in thrust capabilities between flight testing and propeller calculations, resulting in an aircraft which struggled to get off of the ground in vertical flight. By measuring real thrust from the motors, the team could not only verify the vertical flight capabilities of the aircraft, but more accurately account for physical inconsistencies through ArduPilot controls. Ultimately, the team determined that despite bulky structure, the motors gave our aircraft an acceptable 3:1 thrust to weight ratio.